Das Problem: Der Roboter ist fahrtüchtig. Wie kann ich vorgehen, damit der Roboter eine bestimmte Strecke geradaus fährt?
Wir setzen hierzu den Bewegungsblock ein.
Die Programmierung kann einfach sein, hat aber auch ihre Tücken.
Alles was wir hier erklären, gibt es auch auch auf
unserem Youtube-Kanal.
Um uns besser mit dem Bewegungsblock auseinander zu setzen, stellen wir uns eine Aufgabe und analysieren diese:
Aufgabe: Wir wollen den Roboter 50cm geradeaus fahren lassen.
Messung:
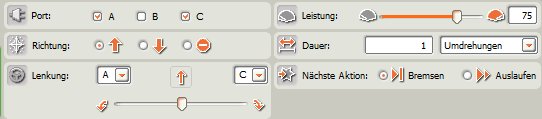
Im Programmfenster liegt ein Bewegungsblock. Wir haben die Motoren, an denen die Räder befestigt sind, mit
den Ports A und C des NXT verbunden. Also müssen wir im Programmierfenster unten in den Eigenschaften des
Bewegungsblocks auch die Haken für die Ports A und C setzen.
Unten rechts stellen wir eine Umdrehung ein und übertragen das Programm auf den Roboter.
Nun starten wir das Programm auf dem Roboter und messen aus, wie weit er sich bewegt.
Ergebnis:
In unserem Beispiel bewegte sich der Roboter 10 cm vorwärts, d.h im Programm
ist eine Einstellung von 5 Umdrehungen nötig.
Tipp: Die Anzahl der Umdrehungen hängt natürlich vom Roboter ab. Große Räder, kleine Räder oder Raupenantrieb
und schon gibt es andere Werte.
Bei der Anzahl der Umdrehungen können Werte mit Nachkommastellen eingetragen werden, falls ihr
nicht ein so glattes Ergebnis habt.
Zusatz:
Leider arbeitet das System nicht beliebig genau. Wenn man dasselbe Programm mehrfach hintereinander ausführt,
kann es zu Abweichungen bei der gefahrenen Strecke kommen.
Alternativ zur Umdrehungszahl könntet ihr mit der Zeiteinstellung experimentieren und mal schauen,
welche Strecke der Roboter nach 2 Sekunden zurücklegt hat.
Dabei wird einfach bei der Stelle der Umdrehungen auf Zeit/Dauer umgestellt und die gewünschte Zeit
eingetragen. Probiert es mal aus.
| Zum letzten Kapitel | Zurück zur Übersichtsseite | Zum nächsten Kapitel |