Das Problem: Wir wollen unseren Roboter eine Drehung machen lassen.
Wie bei einer Strecke komm auch hier ein Bewegungsblock zum Einsatz.
Alles was wir hier erklären, gibt es auch auch auf
unserem Youtube-Kanal.
In diesem Beispiel wollen wir den Roboter um eine bestimmte Gradzahl drehen lassen.
Aufgabe: Wir wollen den Roboter eine 90° Drehung machen lassen.
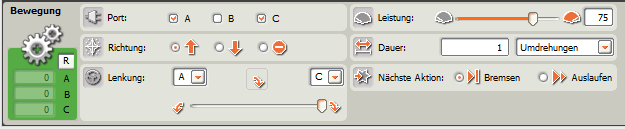
Messung: Wie bei der Aufgabe "Stecke fahren" brauchen wir auch hier einen Bewegungsblock. Je nachdem wo die Motoren angeschlossen sind, müssen wir auch die Ports einstellen. In unserem Beispiel sind das Port A und C. Als nächstes muss die Drehrichtung eingestellt werden. Dafür muss unten links der Schieberegler nach links oder rechts verschoben werden. Je nachdem, ob sich die Motoren links oder Rechts befinden und in welche Richtung der Schieberegler verschoben wurde, dreht sich auch der Roboter in diese Richtung. Als Leistungswert nehmen wir in unserem Beispiel 75 und bei den Umdrehungen den Wert 1. Jetzt muss das Programm nur noch heruntergeladen und getestet werden.
Ergebnis: Bei unserem Beispiel dreht sich der Roboter mit unserem Programm ziemlich genau 90°.
Tipp: Die Leistungs- und Umdrehungszahlen sind bei jedem Roboter unterschiedlich.
Deswegen ist es notwendig das Programm viele Male zu verändern bis das Ergebnis erreicht wird.
Auch die Antriebsart und der Akkustand sind wichtige Faktoren beim Einstellen des Programms.
Als Alternative zu Umdrehungen kann auch eine Gradzahl eingegeben werden.
Hier wird jedoch die Gradzahl eingegeben die der Motor macht und nicht die der Roboter fahren soll.
Zusatz: Je weiter der Schieberegler verschoben wird, desto mehr dreht sich der eine Motor als der andere. Wenn der Schieberegler ganz nach rechts oder links verschoben wird, drehen sich die beiden Motoren in die entgegengesetzte Richtung. Ist dagegen nur ein Motor bei den Ports eingestellt, dann dreht sich nur dieser eine Motor.
| Zum letzten Kapitel | Zurück zur Übersichtsseite | Zum nächsten Kapitel |