Das Problem: Wie kann ich vorgehen, damit der Roboter bis zu einer farbigen Linie fährt?
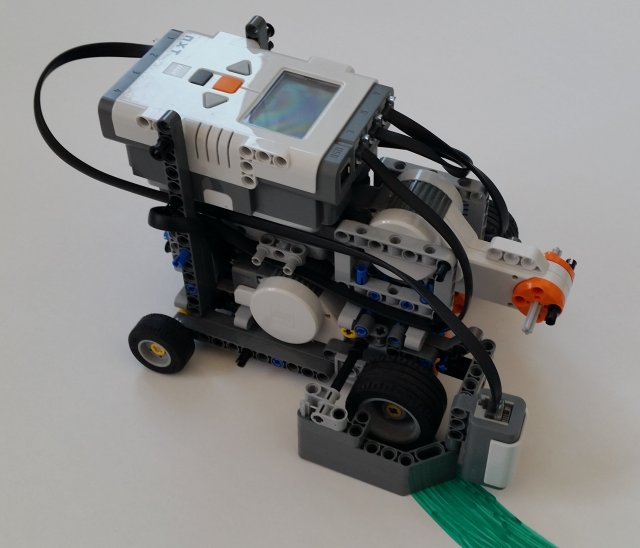
Dazu bekommt der Roboter einen Farbsensor.
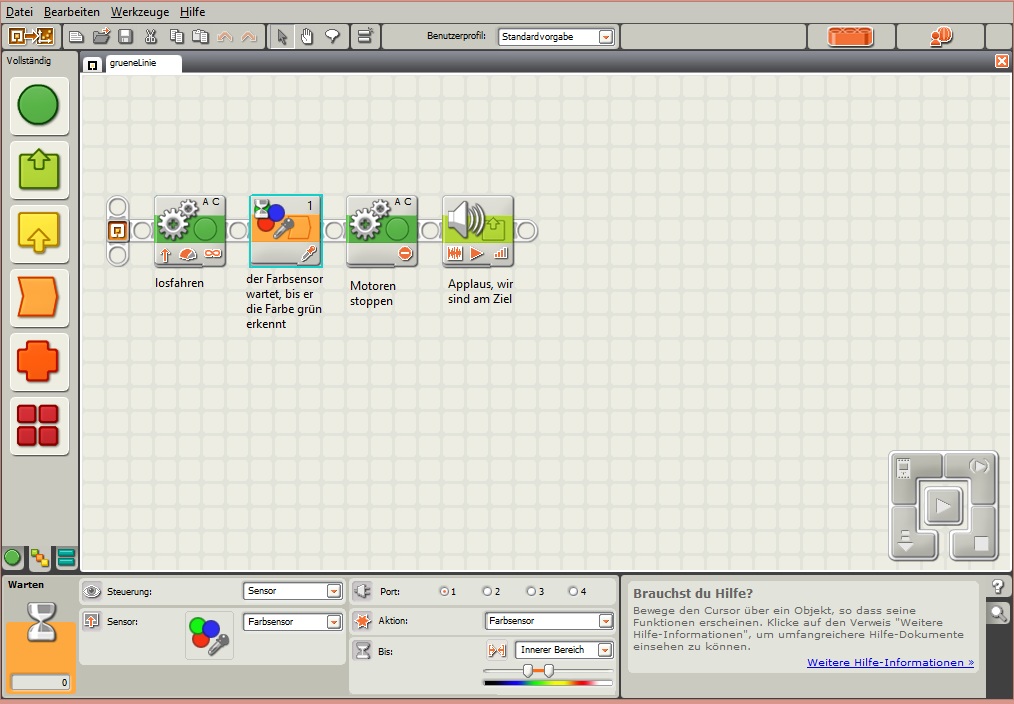
Im Programm setzen wir den Bewegungsblock und den Wartenblock ein.
Alles was wir hier erklären, gibt es auch auch auf
unserem Youtube-Kanal.
Aufgabe: Wir wollen den Roboter bis zu einer grünen Linie fahren lassen.
Idee: Wir lassen den Roboter einfach geradeaus fahren. Der Farbsensor wartet darauf, dass er eine grüne Linie erkennt.
Einstellungen:
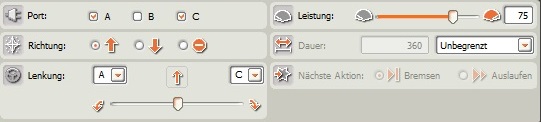

Erklärung: Wird der Bewegungsblock auf unbegrenzt gestellt, so schaltet er nur die Motoren an und geht zum nächsten Block über. Im Wartenblock bleibt er, bis der Farbsensor die eingestellte Farbe erkannt hat.
Zusatz: Man kann im Wartenblock Berührungssensor oder den Ultraschallsensor einstellen. Dazu braucht man entsprechende Sensoren (Druckknopf, Ultraschall) am Roboter. Diese Sensoren kann man dazu benutzen, um Wände zu erkennen. Versucht dies.

| Zum letzten Kapitel | Zurück zur Übersichtsseite |